|
ЧчОӘ№ӨіМКҰәНҝӘ·ўИЛФұЈ¬ОТГЗөД№ӨЧчҫНКЗХТөҪТ»ёцҪ«ЛщУРФӘјюЧйәПФЪТ»ЖрөДЧојС·Ҫ·ЁЎЈІ»№ЬКЗ¶ФУЪДҰМмҙуВҘЎў»№КЗјҜіЙөзВ·Ј¬ДЪІҝ№ӨіМҪб№№¶јКЗҫц¶ЁКЗ·сДЬ№»ФЛЧӘБјәГөД№ШјьЦ®Т»ЎЈө«Лө»ШАҙЈ¬УЦУРЛӯІ»Фш»ГПлЧцёцЎ°ЖЖ»өНхЎұЈ¬°С¶«Оч¶јІрҝӘАҙТ»МҪҫҝҫ№ДШЈҝОТГЗЧоіхөДУл№ӨіМЙијЖУР№ШөДјЗТдҙуІҝ·Ц¶јАҙЧФРЎКұәт°СҝҙЖрАҙёҙФУЎӘЎӘЙхЦБКЗ°ә№уЎӘЎӘөД¶«ОчІрөГЖЯБг°ЛВдЎЈ
јИИ»ИзҙЛЈ¬ОТГЗҫНҙтЛгҝҙТ»ҝҙDLP NIRscan NanoЖА№АДЈҝйЈЁEVMЈ©өДДЪІҝ№№ФмЈ¬ОТГЗҪ«УГАП°м·ЁЎӘЎӘІрҝӘЛьЎЈ
РиТӘЧўТвөДКЗЈ¬ИОәО¶Ф№вТэЗжөДІрҪв¶ј»бК№NIRscan Nano EVMөДұЈРЮК§Р§ЎЈБнНвЈ¬ИҘөф№вТэЗжЙПөДХЦЧУ»бК№»ТіҫәНОЫ№ёҫЫјҜФЪ№вС§ЖчјюЙПЈ¬ҙУ¶шУ°ПмөҪПөНіРФДЬЎЈҙЛНвЈ¬ИҘөфЙПГжөДХЦЧУ»бТЖ¶Ҝ№вС§ЖчјюЎўПБ·мәНМҪІвЖчЈ¬өјЦВХвР©ФӘјюҙнО»Ј¬ҙУ¶шРиТӘі§јТЦШРВҪшРР¶ФЧјәНРЈЧјЎЈ¶шТ»ө©ІріэПБ·мЈ¬ФтРиТӘ°СInGaAsМҪІвЖчәНDLP2010NIR·өі§ҪшРРПөНі¶ФЧјУлРЈЧјЎЈ
ЧЬЦ®Т»ҫд»°Ј¬ХвКВ¶щІ»ДЬФЪјТАпіўКФЎЈ
ОТГЗПИАҙҝмЛЩдҜААТ»ПВЎЈ»щУЪDLPөД·Ц№вјЖУГТ»ёцХл¶ФІЁіӨСЎФсөДКэЧЦОўҫөЖчјюЈЁDMDЈ©әНөҘөгМҪІвЖчИЎҙъБЛҙ«НіПЯРФХуБРМҪІвЖчЎЈНЁ№э°ҙРтҙтҝӘУлМШ¶ЁІЁіӨ№вПа¶ФУҰөДТ»ЧйҫөБРЈ¬¶ФУҰ№вПЯұ»ЦёПтМҪІвЖчЈ¬Іўұ»І¶»сЎЈНЁ№эЙЁГиDMDЙПөДТ»ЧйҫөБРЈ¬ҝЙТФјЖЛгіцОьКХ№вЖЧЎЈ
ҪьәмНвЈЁNIRЈ©№вЖЧ·ЦОцДЪөДDLPјјКхҝЙМṩТФПВУЕКЖЈә
- УлК№УГҫЯУРј«РЎПсЛШөДПЯРФХуБРМҪІвЖчПаұИЈ¬К№УГёьҙуөДөҘөг1әБГЧМҪІвЖчДЬКөПЦёьёЯРФДЬЎЈ
- К№УГөҘФӘМҪІвЖчәНөНіЙұҫ№вС§ЖчјюДЬ°пЦъКөПЦёьөНөДПөНііЙұҫЎЈёЯ·ЦұжВКDMDК№өГ¶ЁЦЖНјРОДЬ№»І№іҘГҝТ»ёцөҘ¶АПөНіөД№вС§К§ХжЎЈ
- ёьҙуРЕәЕөДІ¶»сІ»ҪцөГТжУЪDMDПаұИҙ«НіјјКхёьҙуөД№вХ№БҝЈЁetendueЈ©Ј¬¶шЗТТІКЬТжУЪЖдҝмЛЩЎўБй»оЎўТФј°ҝЙұаіМөДПФКҫДЈКҪј°№вЖЧВЛІЁЖчЙијЖЎЈ
- ҪиЦъҝЙұаіМПФКҫДЈКҪЈ¬DLP·Ц№вјЖДЬ№»Јә
oНЁ№эҝШЦЖТ»ёцҫөБРЦРөДПсЛШКэБҝАҙёДұдөҪҙпМҪІвЖчөД№вөДЗҝ¶ИЎЈ
oНЁ№эҝШЦЖҫөБРөДҝн¶ИАҙёДұдПөНіөД·ЦұжВКЎЈ
oНЁ№эК№УГТ»ЧйHadamardНјРОНкіЙФЪТ»ёцНјРОДЪІ¶ЧҪ¶аёцІЁіӨөД№вЎЈИ»әуЈ¬өҘ¶АөДІЁіӨКэҫЭҝЙНЁ№эҪвВл»сИЎЎЈГҝёцДЈКҪДЪҙтҝӘDMDПсЛШКэБҝөД50%Ј¬ҙУ¶шҪ«ұИЙПГжМбөҪөДБРЙЁГи·ҪКҪ»сИЎөДёьЗҝөДРЕәЕТэЦБМҪІвЖчЎЈ oК№УГ¶ЁЦЖ№вЖЧВЛІЁЖчАҙСЎФсРиТӘөДМШ¶ЁІЁіӨЎЈ
ДҝЗ°Ј¬DLP NIRscan Nano EVMИнјюЦ§іЦҝЙұд·ЦұжВКәНHadamardНјРОЎЈФЭІ»Ц§іЦҝЙұдЗҝ¶ИәН¶ЁЦЖ№вЖЧВЛІЁЖчЎЈ
ФЪТФПВХв·щНјЖ¬ЦРЈ¬ДгҝЙТФҝҙөҪDLP NIRscan Nano EVMөДЦчТӘЧйјюЈә
ДГөф№вТэЗжХЦЧУәуЈ¬ҝЙТФҝҙөҪDMDәНМҪІвЖчөзВ·°еЈә
ПЦФЪЈ¬Из№ыОТГЗДГөф·ҙЙдКҪДЈҝйЈ¬ДгҝЙТФҝҙөҪПБ·мЈә
ПЦФЪЈ¬ОТГЗТСҫӯҝЙТФ¶ФХвёцЖчјюЎ°Т»ААОЮУаЎұБЛЈ¬ИГОТГЗАҙҝҙТ»ҝҙЛьКЗИзәО¶Ф№вҪшРРІЩЧЭөДЎЈ
ҙУСщұҫЙП·ҙЙд»ШөД№вұ»ІЙјҜҫөН·ЛщЛСјҜЈ¬ІўЗТНЁ№эКдИлПБ·мҫЫҪ№ФЪ№вТэЗжЙПЎЈЛщСЎФсөДПБ·міЯҙзДЬ№»ЖҪәвІЁіӨ·ЦұжВКәН·Ц№вјЖөДРЕФлұИЈЁSNRЈ©ЎЈХвёц·Ц№вјЖК№УГТ»ёціӨҝн·ЦұрОӘ1.69әБГЧ x 25ОўГЧөДПБ·мЎЈНЁ№эПБ·мөД№вФЪөЪТ»ЧйҫөН·ЙПРЈЧјЈ¬НЁ№эТ»ёц885ДЙГЧіӨөДІЁНЁВЛІЁЖчЈ¬И»әуҙтФЪТ»ёц·ҙЙд№вХӨЙПЎЈХвёцУлҫЫҪ№НёҫөЧйәПФЪТ»ЖрөД№вХӨҪ«№вФҙЙ«ЙўОӘ№№іЙЛьөДБ¬РшІЁіӨЈЁ¶аЙ«№вПЯЈ©ЎЈҫЫҪ№НёҫөҪ«ПБ·мНјПсХ№ҝӘФЪDLP2010NIR DMDЙПЎЈХвёцПБ·мНјПсөДІ»Н¬ІЁіӨЛ®ЖҪ·ЦІјФЪDLP2010NIR DMDЙПЎЈ№вС§ПөНіҪ«900ДЙГЧөДІЁіӨіЙПсФЪDMDөДТ»¶ЛЙПЈ¬Ҫ«1700ДЙГЧөДІЁіӨіЙПсФЪБнТ»¶ЛЙПЈ¬¶шФЪЦРјд°ҙЛіРтЙўҝӘЛщУРЖдЛьІЁіӨЎЈ
ҪсМмОТГЗХТБЛёцҪиҝЪ°СХвёцЖчјюІрҝӘАҙЧРПёөШҝҙБЛҝҙЎЈИзРи»сөГУлDLPNIRscan Nano EVMУР№ШөДёь¶аРЕПўЈ¬ЗлІОҝјDLP NIRscan NanoУГ»§ЦёДПЎЈ
АҙФҙЈәМм№ӨЙз
|
ұҫМыЧУЦР°ьә¬ёь¶аЧКФҙ
ДъРиТӘ өЗВј ІЕҝЙТФПВФШ»тІйҝҙЈ¬Г»УРХКәЕЈҝБўјҙЧўІб


x
|
|
|
|
|
|
|
|
 |ө№РтдҜАА
|ө№РтдҜАА


 0 12010
0 12010
 PP [ҫЫұыП©] - ЛЬҪәІъЖ·3DҙтУЎІДБПҪйЙЬ
PP [ҫЫұыП©] - ЛЬҪәІъЖ·3DҙтУЎІДБПҪйЙЬ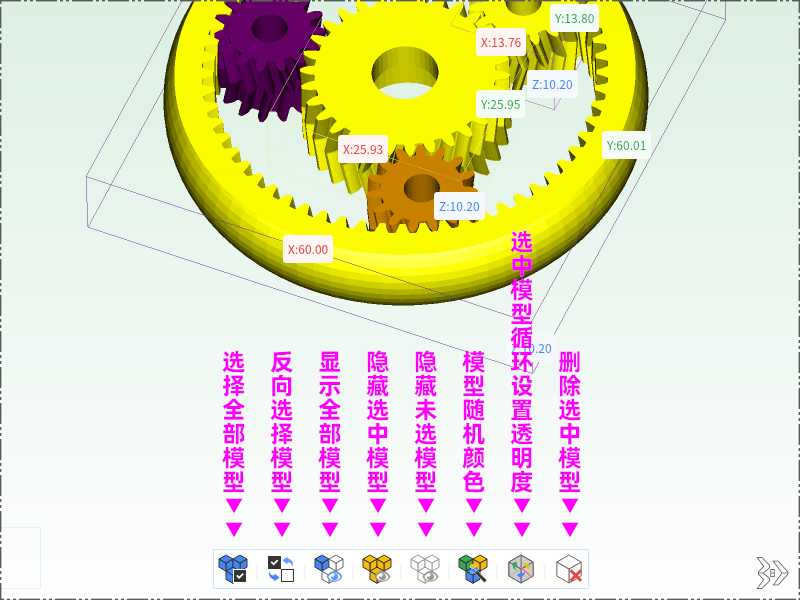 ЎҫөзДФ°жЎҝҙҙПлЦЗФмЎӨГв·СФЪПЯSTPОДјю
ЎҫөзДФ°жЎҝҙҙПлЦЗФмЎӨГв·СФЪПЯSTPОДјю ЎҫКЦ»ъ°жЎҝҙҙПлЦЗФмЎӨГв·СФЪПЯSTPОДјю
ЎҫКЦ»ъ°жЎҝҙҙПлЦЗФмЎӨГв·СФЪПЯSTPОДјю ҙҙПлЦЗФм618ЎӨ3DҙтУЎУЕ»Э»о¶Ҝ
ҙҙПлЦЗФм618ЎӨ3DҙтУЎУЕ»Э»о¶Ҝ AX1800ҫ©¶«ФЖОЮПЯұҰОЮПЯВ·УЙЖчІр»ъЈ¬3D
AX1800ҫ©¶«ФЖОЮПЯұҰОЮПЯВ·УЙЖчІр»ъЈ¬3D QQәГУСәНИә
QQәГУСәНИә QQҝХјд
QQҝХјд МЪС¶ОўІ©
МЪС¶ОўІ© МЪС¶ЕуУС
МЪС¶ЕуУС КХІШ
КХІШ Ц§іЦ
Ц§іЦ ·ҙ¶Ф
·ҙ¶Ф

