发表于 2014-2-28 15:40:39
 |倒序浏览
|倒序浏览


 0 25811
0 25811
| ||
聚丙烯(Polypropylene,简称PP),密度约为 0.9g/cm³,无毒无味,耐高温 100
欢迎大家使用创想智造提供的免费工具软件: 1、查看STP/STEP文件; 2、STP/STEP
欢迎大家使用创想智造提供的免费在线3D文件查看工具软件! 此处为手机版介绍,
即日起,《创想智造3D打印网》开展“618·3D打印优惠活动”。 活动期间,每位
京东云无线宝路由器 AX1800 Pro 256G 使用性能强大的企业级5核芯片IPQ6000,算力
 PP [聚丙烯] - 塑胶产品3D打印材料介绍
PP [聚丙烯] - 塑胶产品3D打印材料介绍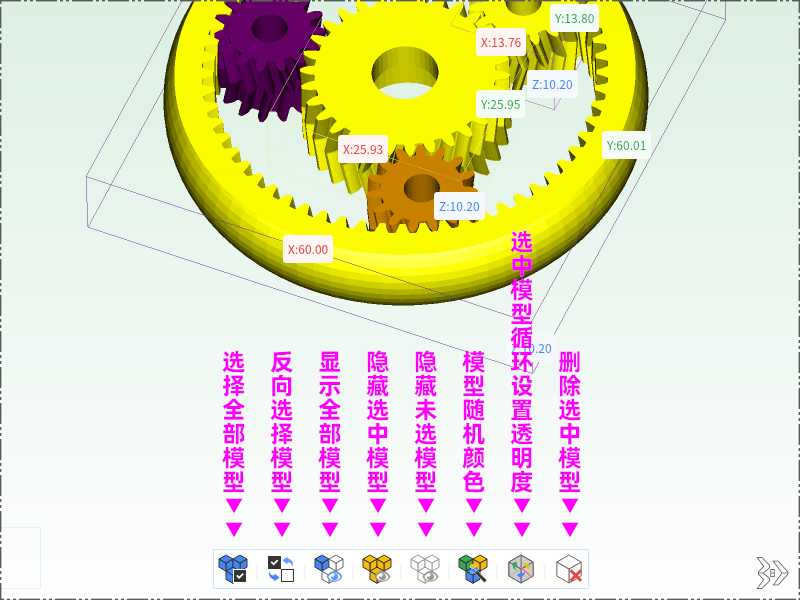 【电脑版】创想智造·免费在线STP文件
【电脑版】创想智造·免费在线STP文件 【手机版】创想智造·免费在线STP文件
【手机版】创想智造·免费在线STP文件 创想智造618·3D打印优惠活动
创想智造618·3D打印优惠活动 AX1800京东云无线宝无线路由器拆机,3D
AX1800京东云无线宝无线路由器拆机,3D

 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 支持
支持 反对
反对

